▶ENGLISH
人間支援ロボット研究室
ホーム
研究内容
論文リスト
受賞歴等
担当科目
メンバー
アクセス
ホーム
研究内容
論文リスト
受賞歴等
担当科目
メンバー
アクセス
研究内容
歩行器型ロボット
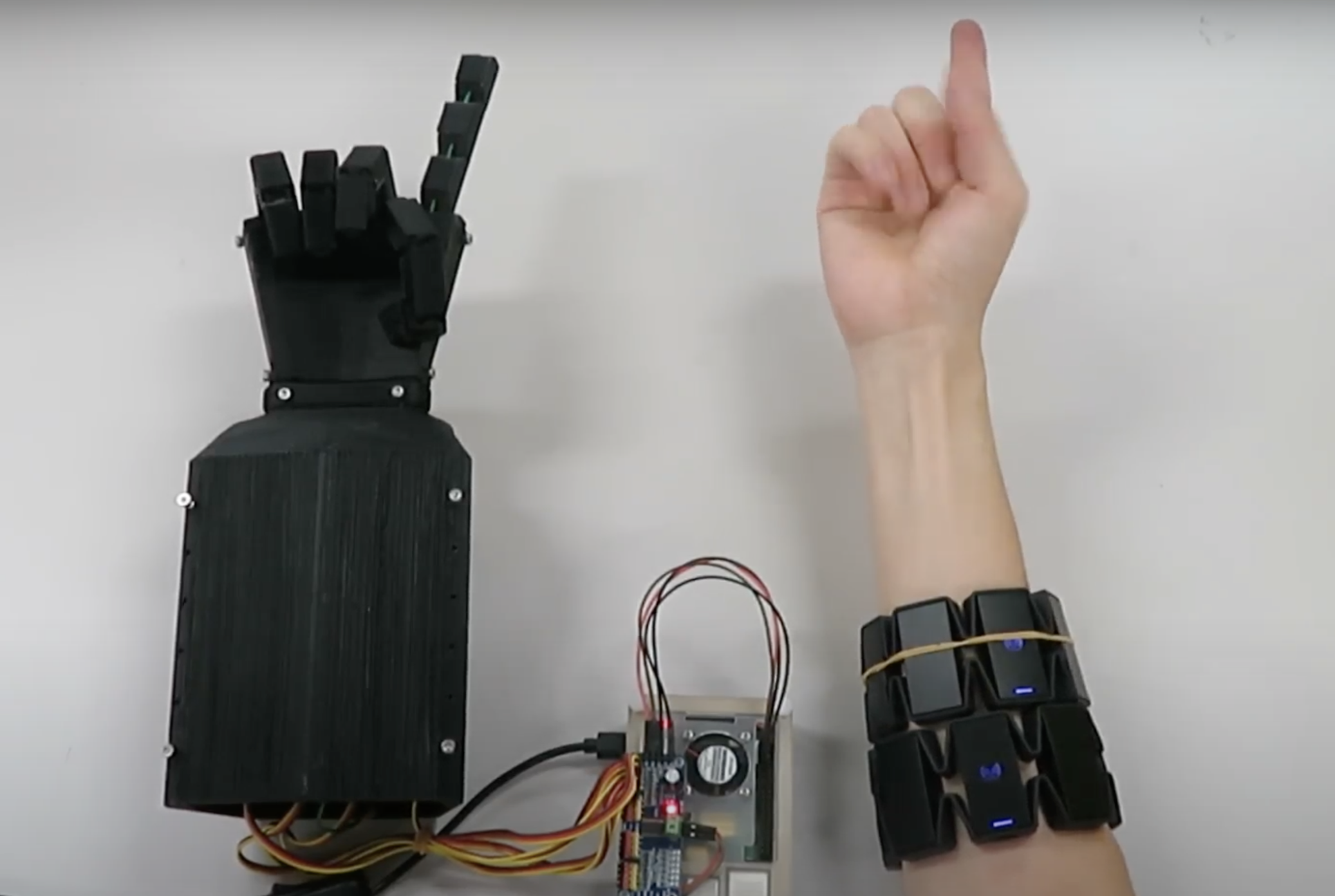
筋電義手
二足歩行ロボット
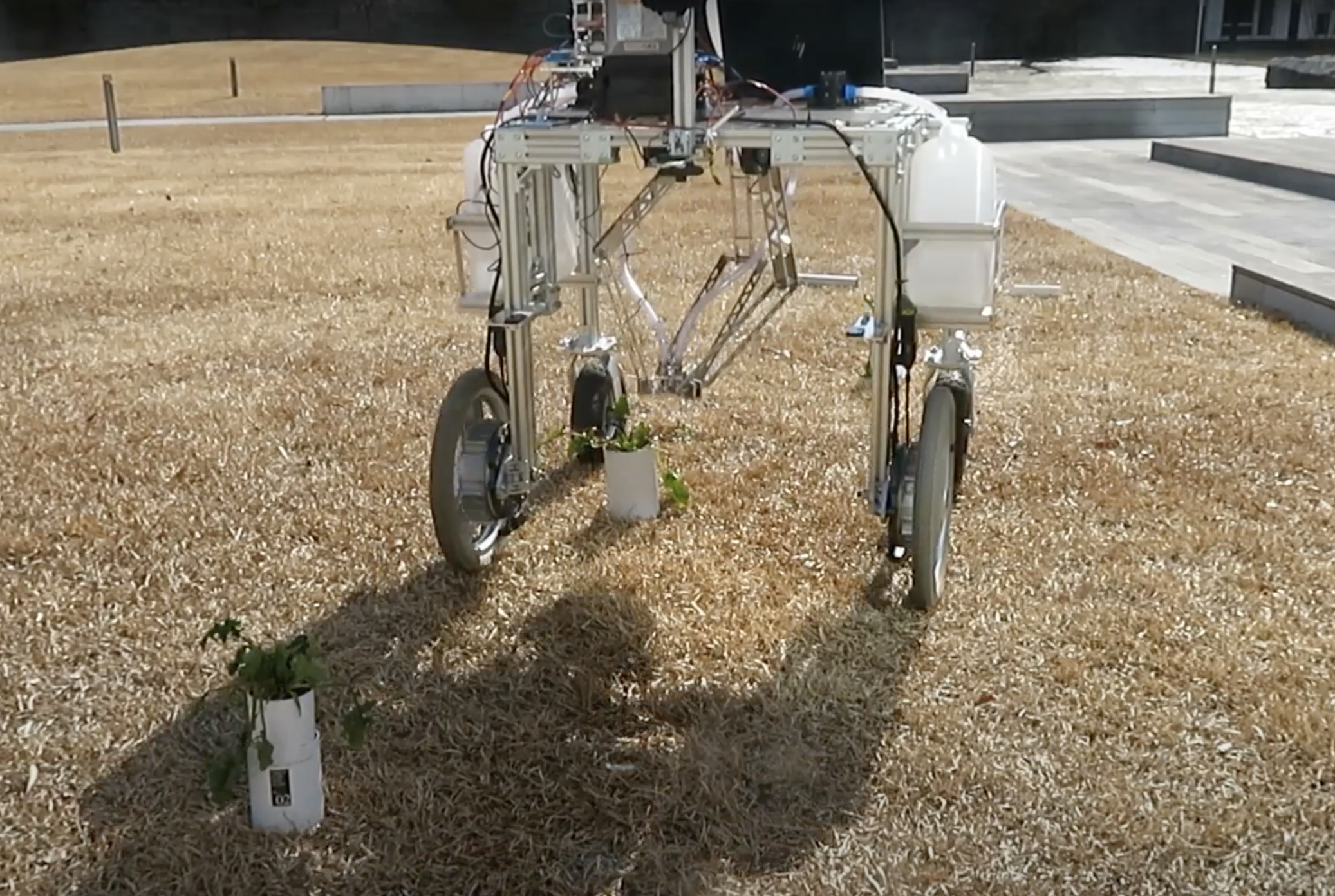
農薬散布ロボット
サトウキビ圃場に適した自律型AIロボットによる生育管理システム開発
この研究は競輪の補助を受けて実施されました
脳波制御ロボット
農業用ドローンの自動給電のための自動着陸システムの開発
サトウキビ圃場に適した自律型AIロボットによる生育管理システム開発
この研究は競輪の補助を受けて実施されました
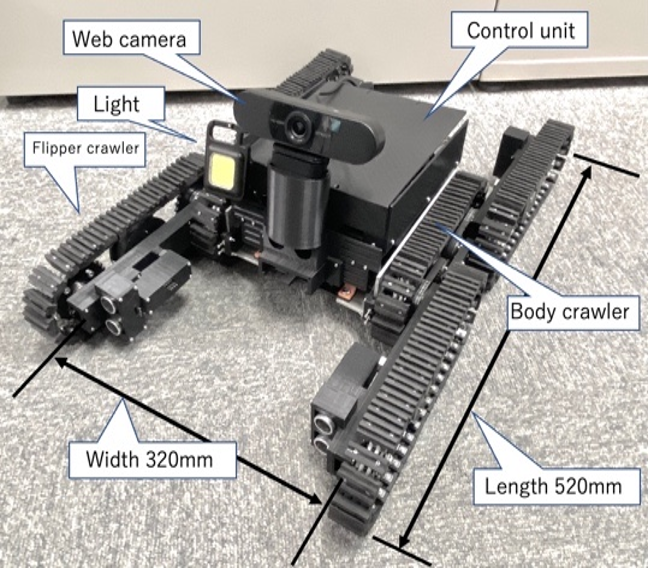
レスキューロボット
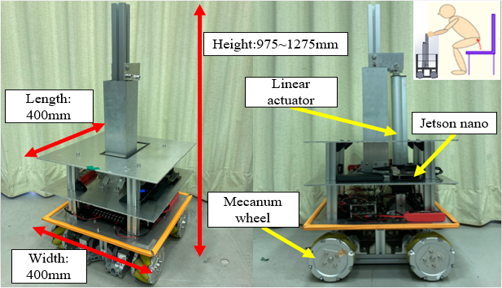
介護用全方向移動型ロボット
マニピュレーター
移動型マニピュレーター
車椅子型ロボット