▶日本語
Assistive Robotics Laboratory
Home
Research
Publications
Awards
Courses
Members
Contact
Home
Research
Publications
Awards
Courses
Members
Contact
Research Issues
Development of a walking assistive robot for elderly people in outdoor
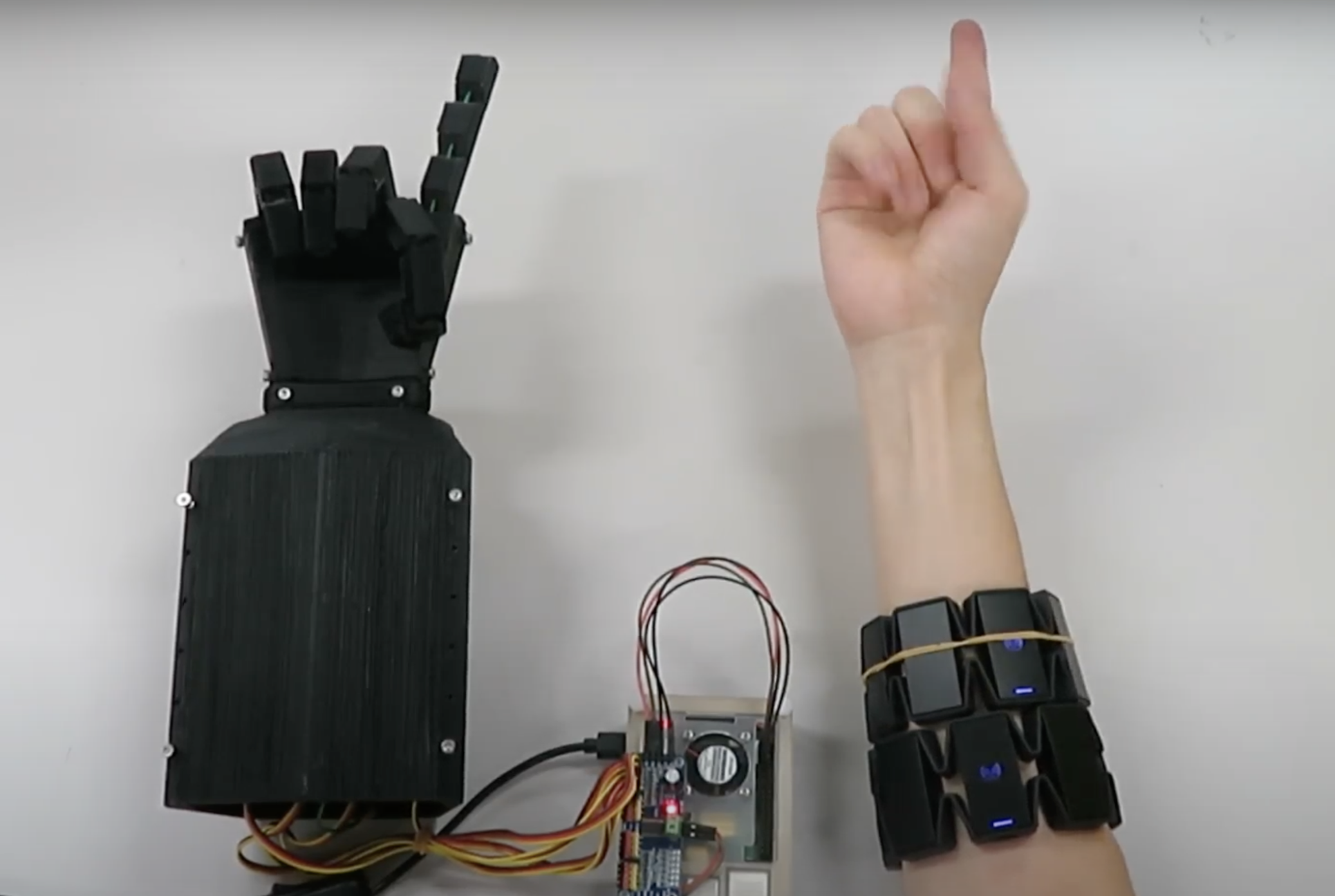
Control of robotic hand using surface EMG data
Development of a humanoid Robot
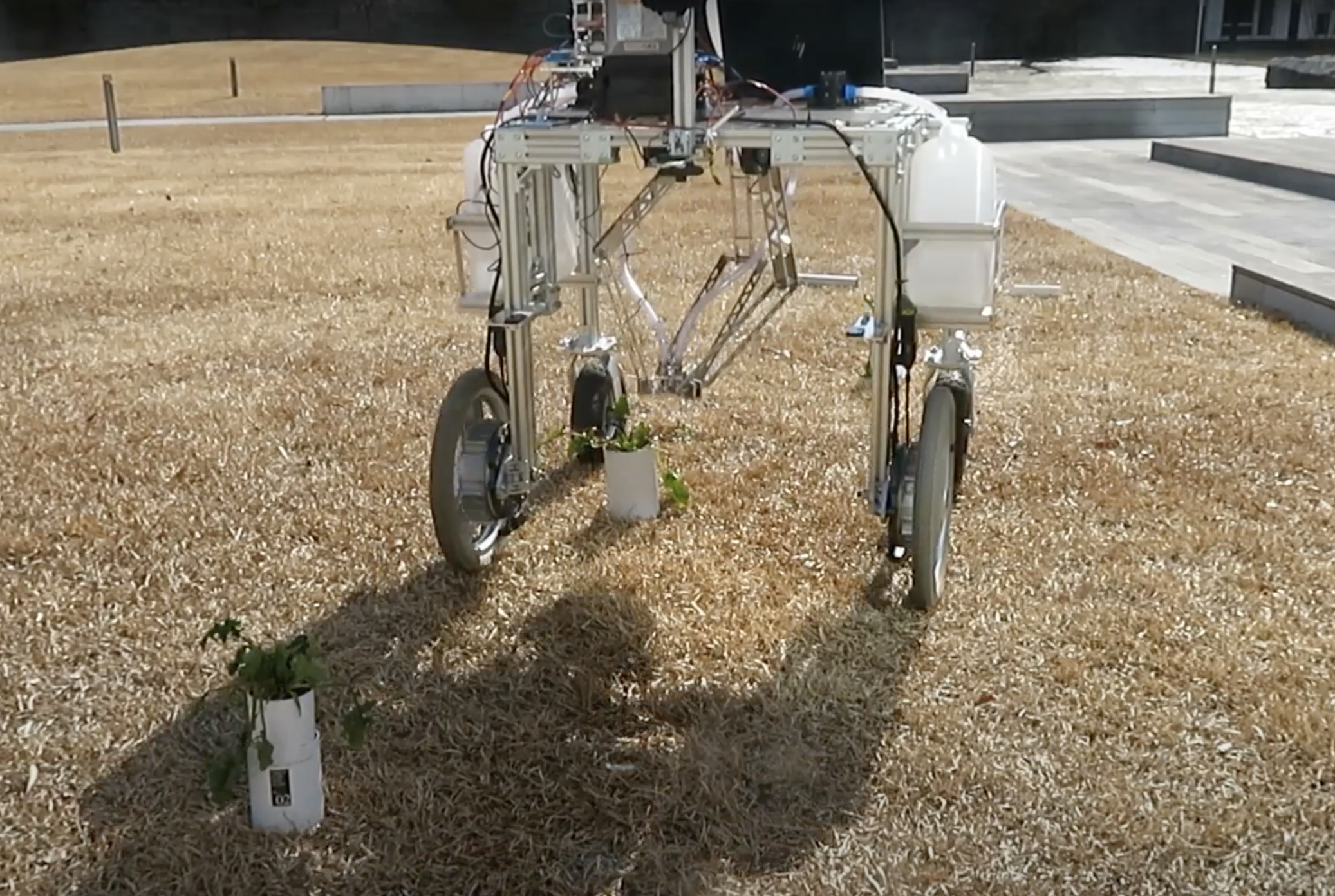
Development of agriculture robot for plant detection and fertilizer dispense
Development of a growth management system using autonomous AI robots suitable for sugarcane fields.
This study was supported by the Keirin
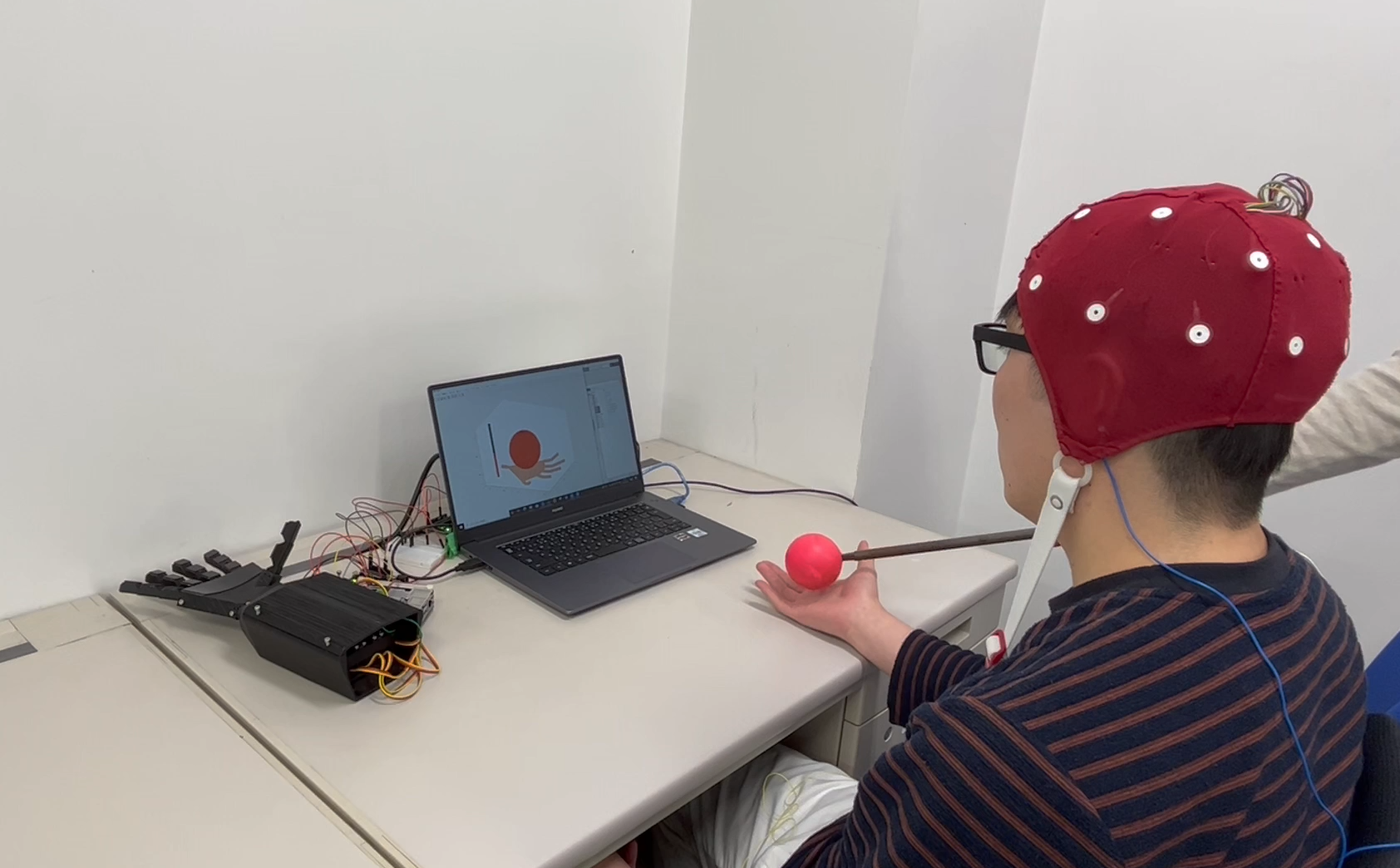
Optimizing convolutional neural networks to control the robotic hand using brain signals
Development of an automatic landing system for agricultural drones for automatic power feeding.
Development of a growth management system using autonomous AI robots suitable for sugarcane fields.
This study was supported by the Keirin
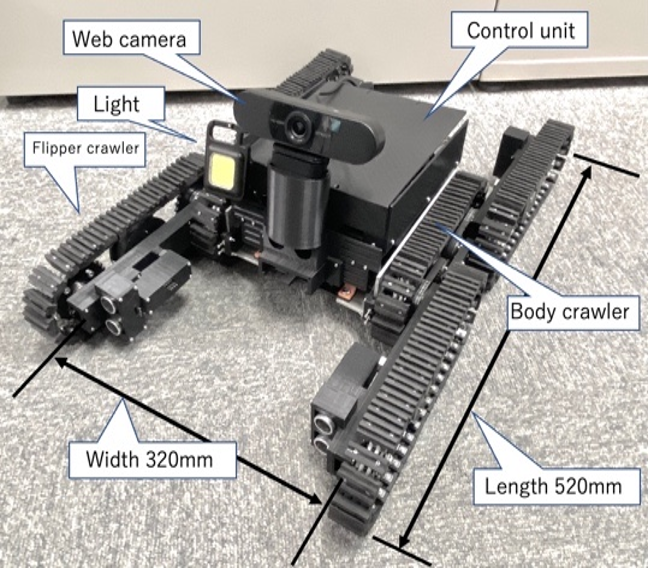
Rescue robot
Omnidirectional mobile robots for nursing care
Recycling of printed circuit boards by robot manipulator: A Deep Learning Approach
Mobile Manipulator
Assistive Wheelchair Robot